下面我們談?wù)劄槭裁此欧姍C用于數(shù)控機床和機械手臂,簡單來說是直流伺服馬達精度在0.001毫米,數(shù)控機床和機械臂的定位精度是重要的,因為涉及到的質(zhì)量生產(chǎn),伺服電機的角度可任意調(diào)整,轉(zhuǎn)速和轉(zhuǎn)矩控制,所有的這些都是機器所需的工具和機械臂,現(xiàn)在機械臂的使用越來越廣泛,可以連續(xù)工作,很少出錯,所以產(chǎn)品的質(zhì)量也越來越好。
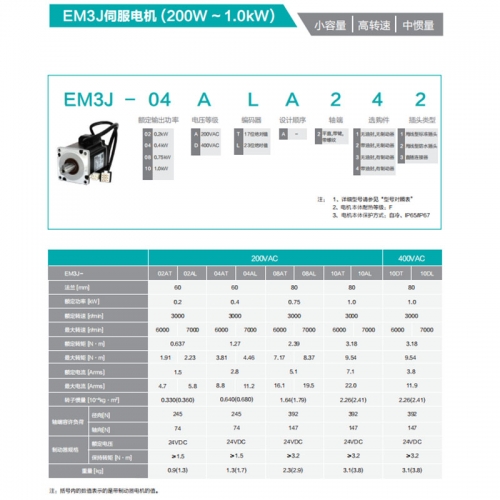
山東伺服電機的選擇一般從幾個方面開始:
1、空載加速力矩與電機從零到額定轉(zhuǎn)速之間的轉(zhuǎn)速有關(guān)。
2、慣性匹配和負(fù)載慣性關(guān)系到設(shè)備運行的穩(wěn)定性和準(zhǔn)確性。
3、負(fù)載轉(zhuǎn)矩,例如,切削負(fù)載轉(zhuǎn)矩不應(yīng)超過額定轉(zhuǎn)矩的80%。
4、伺服電機的速度與機床的行程時間有關(guān),即運行速度。
5、連續(xù)過載時間,過載時間應(yīng)控制在電機允許的過載時間范圍內(nèi),剩下的就是經(jīng)濟、交貨期、質(zhì)量保證等方面了。
如何正確調(diào)試伺服電機?
1、初始化參數(shù)
在接線之前,先初始化參數(shù)。

在控制卡上:選好控制辦法;將PID參數(shù)清零;讓控制卡上電時默許使能信號關(guān)閉;將此狀況保存,確保控制卡再次上電時即為此狀況。
在伺服電機上:設(shè)置控制辦法;設(shè)置使能由外部控制;編碼器信號輸出的齒輪比;設(shè)置控制信號與電機轉(zhuǎn)速的份額關(guān)系。一般來說,主張使伺服作業(yè)中的規(guī)劃轉(zhuǎn)速對應(yīng)9V的控制電壓。
2 接線
將控制卡斷電,連接控制卡與伺服電機之間的信號線。以下的線是有必要要接的:控制卡的模擬量輸出線、使能信號線、伺服輸出的編碼器信號線。復(fù)查接線沒有錯誤后,伺服電機和控制卡(以及PC)上電。此刻電機應(yīng)該不動,而且能夠用外力輕松滾動,假設(shè)不是這樣,檢查使能信號的設(shè)置與接線。用外力滾動電機,檢查控制卡是否能夠正確檢測到電機方位的變化,否則檢查編碼器信號的接線和設(shè)置。
3 試方向
關(guān)于一個閉環(huán)控制體系,假設(shè)反應(yīng)信號的方向不正確,結(jié)果肯定是災(zāi)難性的。通過控制卡翻開伺服的使能信號。這是伺服應(yīng)該以一個較低的速度滾動,這便是傳說中的“零漂”。
一般控制卡上都會有克制零漂的指令或參數(shù)。運用這個指令或參數(shù),看電機的轉(zhuǎn)速和方向是否能夠通過這個指令(參數(shù))控制。
![]() 公司服務(wù)熱線:
公司服務(wù)熱線:
![]() 公司網(wǎng)址:
公司網(wǎng)址:
![]() 公司地址:
公司地址: